 您好,歡迎訪問深圳特信電子有限公司網(wǎng)站!
您好,歡迎訪問深圳特信電子有限公司網(wǎng)站!


公司總部:深圳市龍崗區(qū)坂田街道恒大都會廣場1棟30樓深圳市特信電子有限公司
手機(jī):13537825155
郵箱:806667198@qq.com
服務(wù)熱線:0755-83247232

Latest News
Latest News
Latest News
Contact Us
無人機(jī)反制設(shè)備打擊的有效范圍是多少?
2019-04-26 17:10:42
當(dāng)向潛在客戶展示您的反無人機(jī)系統(tǒng)是時,個問題總是相同的:“打擊的范圍是什么?”
不幸的是,大多數(shù)客戶都熟悉鏈路和通信設(shè)備,但對干擾和設(shè)備本身的概念不太熟悉。因此,他們不明白為什么這個問題沒有“簡單”或單一的答案。
本文的目的是解釋如何實現(xiàn)“鏈接”塊的計算和/或度量。很明顯,干擾器并沒有鏈接到受害者,但我們可以像我們觀察兩個“合作伙伴”之間的正常溝通鏈接一樣分析它們之間的相互作用。
一般來說,我們可以說通信鏈路只有一個需要計算的維度(TX-> RX),對于阻塞情況,需要計算兩個維度(TX-> RX和干擾器-> RX)然后進(jìn)行比較。將在接收機(jī)輸入端呈現(xiàn)更強(qiáng)信號的“鏈路”將占主導(dǎo)地位; 它可以是變送器(“合作伙伴”)或阻滯劑。
為了更好地解釋這個問題,我們將首先嘗試解釋通信阻塞的基本概念。
阻止概念
干擾器的作用是中斷兩個(或更多)合作伙伴之間的通信鏈路(或網(wǎng)絡(luò)); 當(dāng)他們試圖彼此交談或在他們之間傳遞某些數(shù)據(jù)時,即使在無人機(jī)與其操作員之間發(fā)生通信鏈接也是一個特殊情況,與其他許多人不同。我們可以嘗試阻止手機(jī)和基站之間,兩個戰(zhàn)術(shù)收音機(jī)之間,泵和用于激活它的遙控器之間的通信等。簡單的鎖定案例好描述為下面的“三角形”(圖1)。
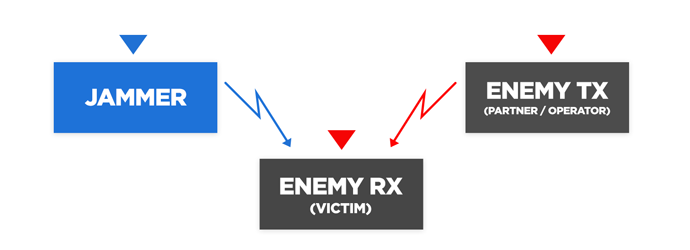
圖1 - 塊的“三角形”
為了阻止,干擾器以與敵方的鏈路或網(wǎng)絡(luò)相同的頻率發(fā)射射頻能量(CW +調(diào)制)。敵方接收機(jī)(“收聽”方)將接收阻止者傳輸和“伙伴”傳輸。更強(qiáng)大的意志占上風(fēng); 如果阻斷器的功率大于伙伴的功率,聽眾將無法正確理解消息/數(shù)據(jù)。或者,如果“合作伙伴”的權(quán)力大于阻止者的權(quán)力,則聽眾可能能夠正確理解消息/數(shù)據(jù),并且伙伴之間的通信鏈接應(yīng)該繼續(xù)不間斷。
這個解釋有點膚淺,旨在簡化事情。但是,如果我們試圖深入研究這個問題,可以插入更多參數(shù)來比較兩個鏈路的信號電平。一個例子是接收器在其輸入中“看到”的SNR(信號噪聲比)。有時到達(dá)接收機(jī)輸入端的干擾信號可能會小于通信信號(“伙伴”)并仍然占上風(fēng)。發(fā)生這種情況的原因通常是接收器在輸入端的兩個信號之間需要一定的余量,以便能夠解釋其中的一個(通常是強(qiáng)的一個)。但是,在先進(jìn)的通信系統(tǒng)中,
為了簡單起見,我們在討論中不考慮SNR,并且我們將繼續(xù)假設(shè)接收機(jī)輸入端的強(qiáng)信號總是“勝利”。
計算/測量 的的 有效干擾的范圍
在了解了干擾的基礎(chǔ)知識后,我們將嘗試了解干擾的范圍是如何計算的。應(yīng)該為此使用以下“二維三角形”(圖2):
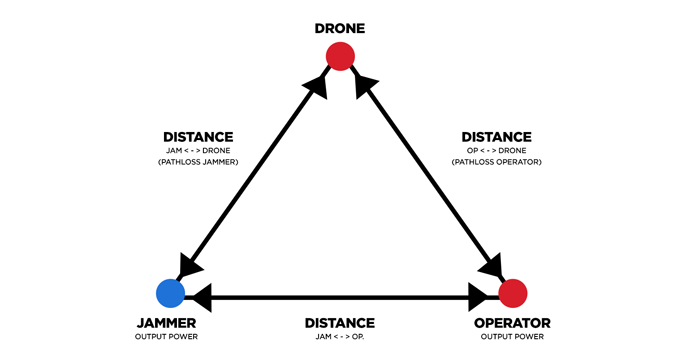
在該圖中,假設(shè)阻攔天線的高度以及操作員遙控器的高度與無人機(jī)高度(典型飛行高度10-20米)相比相對較小。現(xiàn)在也應(yīng)該提到阻塞天線安裝得越高 - 干擾的范圍越大; 同樣,操作員獲得遙控器越高,通訊范圍越大(因此干擾范圍越小)。
現(xiàn)在是另一個重要澄清的時候了。一般來說,在無人機(jī)應(yīng)用中,其目的是在距離敏感區(qū)域/周邊(安裝阻擋器的地方)數(shù)百米內(nèi)鎖定無人機(jī)。例如,我們想攔截距離干擾機(jī)300米并在10米高處飛行的無人機(jī)。可以看出,在這種情況下,阻擋器和無人機(jī)之間的對角線距離近似等于它們之間的水平距離。因此,為了簡化事情,我們將討論水平距離,并且不會因準(zhǔn)確的距離計算而煩惱,因為差異非常小。
現(xiàn)在,讓我們編寫描述到達(dá)接收器輸入端的信號功率電平的數(shù)學(xué)表達(dá)式,忽略電纜損耗。
接收器輸入端的操作員信號
Ro = Po + Go - Plo + Gdo
其中:
Ro =無人駕駛接收機(jī)輸入端操作員遙控器的信號電平;
Po =操作員遙控器的輸出功率;
Go =操作員遙控器的天線增益;
Plo =在操作員的遙控信號上造成的傳播損失。“無人機(jī)< - >操作員距離”用于計算此損失,以及無人機(jī)高度和遙控天線高度;
Gdo =無人機(jī)接收機(jī)的天線增益,當(dāng)向操作員方向“看”時;
重要提示:Ro必須大于無人機(jī)接收機(jī)的靈敏度,否則操作員與您的無人機(jī)之間不會建立通信鏈路(因此不需要阻擋器)。
接收器輸入端的干擾信號
Rj = Pj + Gj-Plj + Gdj
其中:
Rj =無人機(jī)接收器輸入端的干擾信號電平;
Pj =在所使用的特定頻率/通道處的干擾器的輸出功率;
Gj =在所使用的特定頻率/信道下的干擾天線的增益;
Plj =干擾信號上的傳播損失。距離“干擾器 < - > Drone”用于計算此損耗,以及無人機(jī)的高度和干擾器天線的高度;
Gdj =無人機(jī)接收機(jī)的天線增益,當(dāng)向著干擾機(jī)“看”時。
然后需要比較Ro和Rj。如前所述,為了簡單起見,我們將假設(shè)它們足以比較它們,而強(qiáng)烈的信號總是“勝利”。我們將:
Pj + Gj - Plj + Gdj(<=>)Po + Go - Plo + Gdo
該等式盡管以其簡單的形式(沒有電纜損耗,SNR等)可用于計算EACH塊場景。可以看出,它由兩個維度/鏈接(Blocker < - > Drone和Operator < - > Drone)組成,而不僅僅是通信鏈接的維度/鏈接。
換句話說,對于無人機(jī)鏈路的每個特定條件(特定輸出功率,天線的增益和高度,距離等),存在無人機(jī)鏈路的特定場景/條件,它。這就是為什么我們回答“反無人機(jī)打擊系統(tǒng)的有效范圍?”的問題。從來不是一件容易的事。有很多可能的答案!
讓我們試著更好地理解這個困難。乍一看,這個方程似乎不太復(fù)雜。但是,當(dāng)“深入挖掘”每個參數(shù)的細(xì)節(jié)時,很快就會發(fā)現(xiàn)一個非常復(fù)雜的情景:
答:如果干擾器的輸出功率不是所有通道的固定值,則對于干擾器打算攻擊的每個頻帶,Pj具有不同的值; Po的情況也是如此,因為我們經(jīng)常遇到不同的Drone模型(和遙控器),它們具有完全不同的特性;
B.如果干擾器天線的增益不是所有通道的固定值,則對于干擾器打算攻擊的每個頻帶Gj都有不同的值; Go也是如此,因為我們經(jīng)常遇到不同的Drone模型(和遙控器),它們具有完全不同的特性;
C.假設(shè)無人機(jī)處于運動狀態(tài),那么Gdj和Gdo的值可能會不斷變化;
D.后,動態(tài)和不斷變化的參數(shù)是在兩個信號(Plj和Plo)上造成的Pathloss(傳播損失)。無人機(jī)運行后,“干擾器 < - > Drone”距離和“操作員無人機(jī)”距離會不斷變化; 一般來說,當(dāng)他們中的一個越來越大,另一個越來越小。更糟糕的是,更多的參數(shù),例如干擾器天線高度和遙控天線,以及無人機(jī)的高度也正在進(jìn)入該計算。
現(xiàn)在我們知道上述方程中出現(xiàn)的所有八(8)個參數(shù)可以有很大的變化,因此應(yīng)該非常清楚,因為干擾范圍的定義并不那么簡單。答案始終是CONDITIONED。例如,如果有人問我們干擾機(jī)是否可以在300米的距離阻擋無人機(jī),答案是有時候它會是,有時候不會。確切的答案總是取決于以下幾個方面:
A.我們試圖攻擊的具體Drone模型(它將定義所使用的頻帶,等式兩邊的輸出功率和天線增益);
B.每個元件的天線高度(無人機(jī)天線,操作員天線和干擾天線)。
注意:我們可以嘗試在這里定義一個“共同點”,以減少變量的數(shù)量。我們認(rèn)為,當(dāng)無人機(jī)在地面上時(高度= 0米),必須計算或測量干擾范圍。干擾器和操作員也應(yīng)該在地面上(天線高度高1-3米),而不是在山上或建筑物頂部。這是一個很好的測量方法,因為它也模擬了干擾器的壞情況。這是由于Drone天線的全方位行為,以及“干擾器 < - > Drone”距離大于“Operator無人機(jī)”這一事實,使得干擾器信號非常比操作員的信號更容易受到地面反射的影響。現(xiàn)在應(yīng)該提及的是,
C.距離比(干擾器 < - > Drone / Operator < - > Drone)。為了更好地理解這一點,讓我們從4:1距離比(圖3)中檢查以下情況:
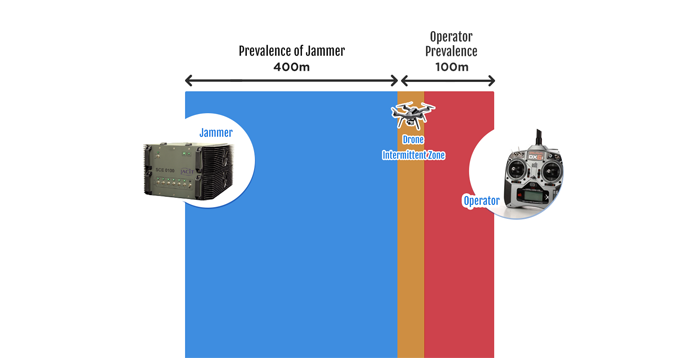
圖3 - 距離比例為4:1的示例
從圖2D中,可以清楚地看到,無人機(jī)運動同時影響兩個距離(干擾器 < - > Drone和Operator < - > Drone)。當(dāng)無人駕駛操作員距離較短時,無人機(jī)距離較遠(yuǎn),反之亦然。因此,當(dāng)無人駕駛飛機(jī)靠近其操作員(本例中小于100米)時,出現(xiàn)在無人機(jī)接收器輸入端的操作員信號比干擾信號強(qiáng)。當(dāng)無人機(jī)靠近干擾機(jī)(本例中小于400米)時,出現(xiàn)在無人機(jī)接收機(jī)輸入端的干擾信號比操作員信號強(qiáng)。
結(jié)論
正如本文所顯示的,我們不能說真正的達(dá)到,而是距離關(guān)系。即使這種關(guān)系也不能被認(rèn)真討論,更不用說無人機(jī)模型和天線高度,為此計算和/或測量這個比率。
推薦產(chǎn)品

反制設(shè)備功放模組-20W干擾屏蔽模塊")
反制箱")
